


了解更多
了解更多
300000
㎡80000
㎡2000
个150
家了解更多
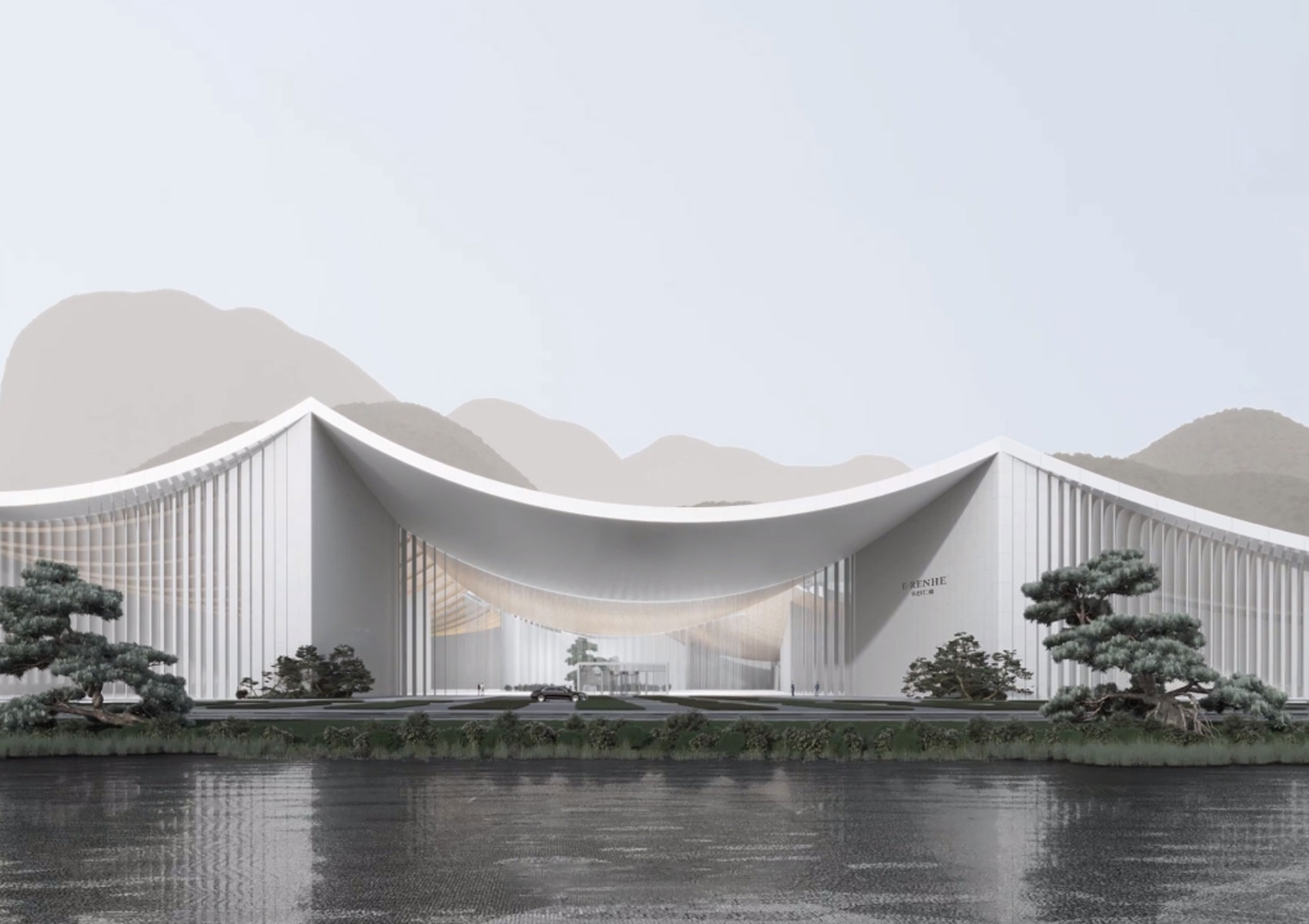
以人为尺度,构建出行生活服务生态圈 为多元化出行体验提供无限可能 用超越期待的城市出行体验,抵达100种向往的生活
Group News

了解更多
中国·四川
成都市天府新区万福寺路1233号
咨询热线
028-89116890


成都市天府新区万福寺路1233号






















